The Tag-Drone can be
interpreted as a sensor with flying
capability in order to highlight
that only elementary UAV features
are expected. The Tag-Drone may be
used in standalone mode or according
to the more fascinating swarm
configuration (like bees)
cooperatively collecting information
within a same environment.
Tag-drones should have small size so
that they could be referred to the
technology of micro-drones.
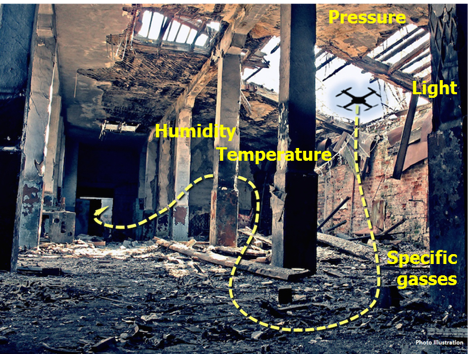
The Reader-Drone
system consists of a suitable UAV
hosting an autonomous RFID reader to
act as mobile scanner of the
environment. The drone can be
manually or automatically remotely
driven to approach tags displaced on
a surface and retrieve sensed data.
Sampled data may be stored on-board
for a later-time recovery when the
drone comes back, or may be instead
transmitted in real time to a fixed
base station placed in radio
visibility with the drone itself.
The Reader-Drone
technology involves specific
features, with respect to standard
ground-level inventory and sensing,
such as:
i)the very limited
power budget, allowing for only
short reading sessions,
ii)tags
placed at a very close distance from
a large surface, or directly
attached over it,
iii)a moving agent
iv)the need to quickly
approach the tags from a remote
distance.
The concept of Reader-Drone’s
footprint is related to the ability of an
Reader-Drone framework to detect sensors over
the surface of interest in the shortest possible
time in order to comply with its limited power
autonomy.
RFIDrone: Preliminary
Experiments and Electromagnetic Models M. Longhi, G. Casati, D. Latini, F.
Carbone, F. Del Frate and G. Marrocco, URSI
International Symposium on Electromagnetic
Theory (EMTS 2016), 14 - 18 August 2016,
Espoo, Finland.